Bruna Brandăo/UFMG
|
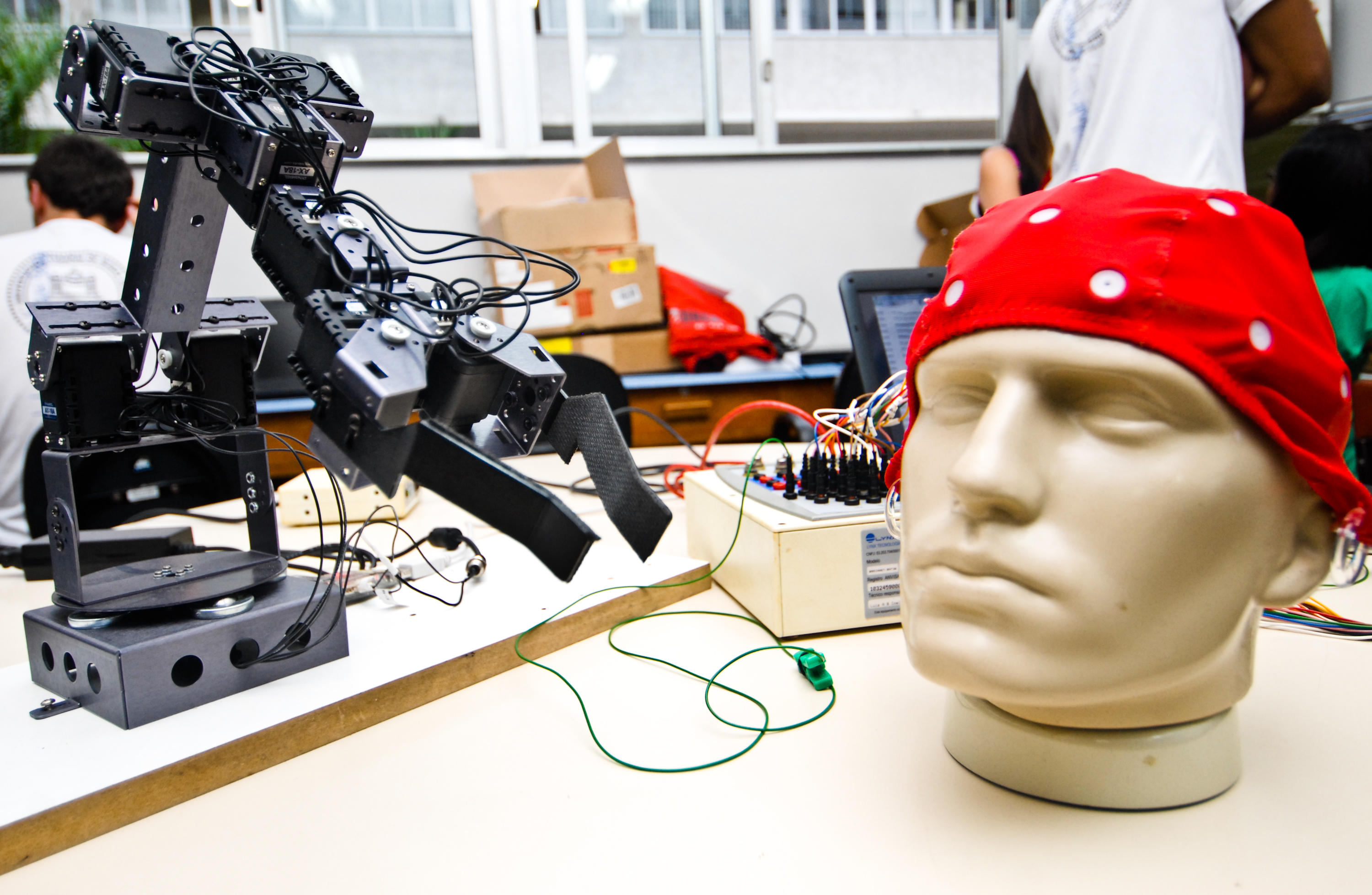
Estudos na área de neurorrobótica buscam ampliar capacidades humanas
sexta-feira, 5 de outubro de 2012, ŕs 9h00Movimentando-se ao longo de um corredor, um cadeirante avista uma porta cinco metros ŕ sua frente. Enquanto seu cérebro emite o sinal elétrico indicando que o caminho a ser tomado é ŕ direita, a cadeira de rodas, dotada de um sistema de mapeamento e simulaçăo computacional, já processa as diferentes direçőes possíveis, integrando-se ao trabalho cognitivo do usuário. O que parece cena de ficçăo científica já está próximo de se tornar realidade, graças a pesquisas conjuntas entre as áreas de neurocięncias e robótica. O Laboratório de Engenharia Biomédica e o Laboratório de Computaçăo e Robótica, ambos vinculados ao Departamento de Engenharia Elétrica da UFMG, atuam nesse campo de investigaçăo, desenvolvendo estudos de interface cérebro-máquina. Fisioterapeutas, neurofisiologistas, otorrinolaringologistas, fonoaudiólogos, engenheiros civis, elétricos, eletrônicos e de controle e automaçăo, entre outros profissionais, compőem as equipes, cuja missăo é aplicar sinais cerebrais a dispositivos robóticos. “Nossa proposta é desenvolver tecnologias de interface năo invasivas”, ressalta o coordenador do Laboratório de Engenharia Biomédica, Carlos Julio Tierra. Nesse sentido, o primeiro passo foi a realizaçăo de experimentos de eletro-oculograma , que promoviam o controle de máquinas por meio de movimentos oculares humanos. “Em seguida, partimos para a estimulaçăo sensorial, utilizando um sistema de LEDs que piscavam com diferentes frequęncias, o que induzia distintas respostas cerebrais”, revela. O desafio, agora, é aplicar os resultados desses estudos no desenvolvimento de um veículo autônomo – a cadeira de rodas “inteligente”. Máquinas no comando Estudioso da área de robótica cooperativa, Adorno tem realizado, nos últimos anos, experimentos de interaçăo entre humanos e robôs. No último sábado, dia 29, ele apresentou no 6ş Simpósio internacional de neurocięncias da UFMG alguns resultados de sua pesquisa de doutorado, concluída em 2011, na Université Montpellier 2 / LIRMM (França). Em experimento inédito realizado no ano passado em parceria com o professor Antônio Padilha, da Universidade de Brasília, ele utilizou a técnica chamada “estimulaçăo elétrico-funcional de superfície” para controlar a funçăo neuromuscular humana. Foram colocados eletrodos no braço de uma pessoa, com uma intensidade elétrica muito mais alta do que o sinal proveniente de seu cérebro. Dessa forma, o indivíduo perdeu o controle sobre sua própria musculatura. “A pessoa tinha que jogar uma bola para dentro de uma cesta – sendo que, naquele momento, era o robô quem controlava o braço humano”, conta. No mesmo período, ele desenvolveu um formalismo matemático para descrever a interaçăo humano-robô. “Se eu quiser que um robô coloque água no meu copo, por exemplo, ele deverá saber onde está o recipiente para derramar o líquido, em que posiçăo se encontra e qual a orientaçăo dele no espaço. Baseando-se nessas informaçőes, ele terá que fazer uma série de operaçőes matemáticas para realizar a tarefa”, salienta. O cálculo é complexo por envolver um trabalho de coordenaçăo mútua: se a măo da pessoa se move, a máquina também deve se movimentar. A manipulaçăo cooperativa é outra questăo ŕ qual Adorno tem se dedicado. Nesse caso, homem e máquina se aliam para realizarem, juntos, uma tarefa. “Digamos que a ideia seja movermos uma mesa, por exemplo: é preciso descrever essa situaçăo de maneira que ambos participem, mas sem que haja movimentos conflitantes", observa. “Tudo deve ser feito de forma coordenada.” (Gabriella Praça)
 Se o aparelho motor humano funciona de maneira bastante complexa, com a neurorrobótica boa parte da “inteligęncia motora” fica a cargo de uma máquina. “Divide-se a complexidade do sistema, pois o robô detecta a intençăo humana de movimento, realizando-o”, esclarece o professor do Departamento de Engenharia Elétrica da UFMG Bruno Vilhena Adorno [na foto de Bruna Brandăo]. “O intuito é fazer com que homem e máquina, associados, tornem-se mais eficientes e poderosos do que cada um deles individualmente.”
Se o aparelho motor humano funciona de maneira bastante complexa, com a neurorrobótica boa parte da “inteligęncia motora” fica a cargo de uma máquina. “Divide-se a complexidade do sistema, pois o robô detecta a intençăo humana de movimento, realizando-o”, esclarece o professor do Departamento de Engenharia Elétrica da UFMG Bruno Vilhena Adorno [na foto de Bruna Brandăo]. “O intuito é fazer com que homem e máquina, associados, tornem-se mais eficientes e poderosos do que cada um deles individualmente.”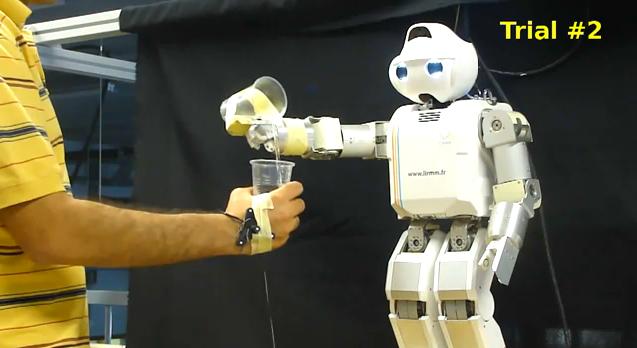
Experimento de interaçăo humano-robô realizado pelo professor Bruno Adorno em 2011